
Cet article contient la procédure que j’ai utilisée pour mettre en place facilement une instance de NextCloud sur mon serveur domestique. Sa vocation principale est de me permettre de réitérer la procédure, sans aucune garantie d’adéquation avec un besoin autre.
Installation
On créé un pod « nextcloud », qui contient 2 conteneur : l’instance NextCloud, et une base de donnée MariaDB.
Les données des 2 conteneurs sont stockées dans les volumes respectifs « nextcloud_data » et « nextcloud_mariadb » pour permettre leur sauvegarde ultérieure.
Il suffit de 3 commandes :
# podman pod create --name nextcloud-pod -p 8080:80
# podman run -d --name mariadb \
--pod nextcloud-pod \
-e MARIADB_ROOT_PASSWORD=XXXXXXXXX \
-e MARIADB_USER=nextcloud \
-e MARIADB_PASSWORD=YYYYYYYYY \
-e MARIADB_DATABASE=nextcloud \
-v nextcloud_mariadb:/var/lib/mysql \
docker.io/library/mariadb:latest
# podman run -d --name nextcloud \
--pod nextcloud-pod \
-e MYSQL_HOST=mariadb \
-e MYSQL_DATABASE=nextcloud \
-e MYSQL_USER=nextcloud \
-e MYSQL_PASSWORD=YYYYYYYYY \
-v nextcloud_data:/var/www/html \
docker.io/library/nextcloud:latest
Remplacer bien sûr XXXXXXXXX ainsi que YYYYYYYYY par des mots de passe fort.
Ensuite, l’installation se poursuit dans un navigateur, à l’adresse ZZZ.ZZZ.ZZZ.ZZZ:8080 (ZZZ.ZZZ.ZZZ.ZZZ étant l’adresse IP du serveur).
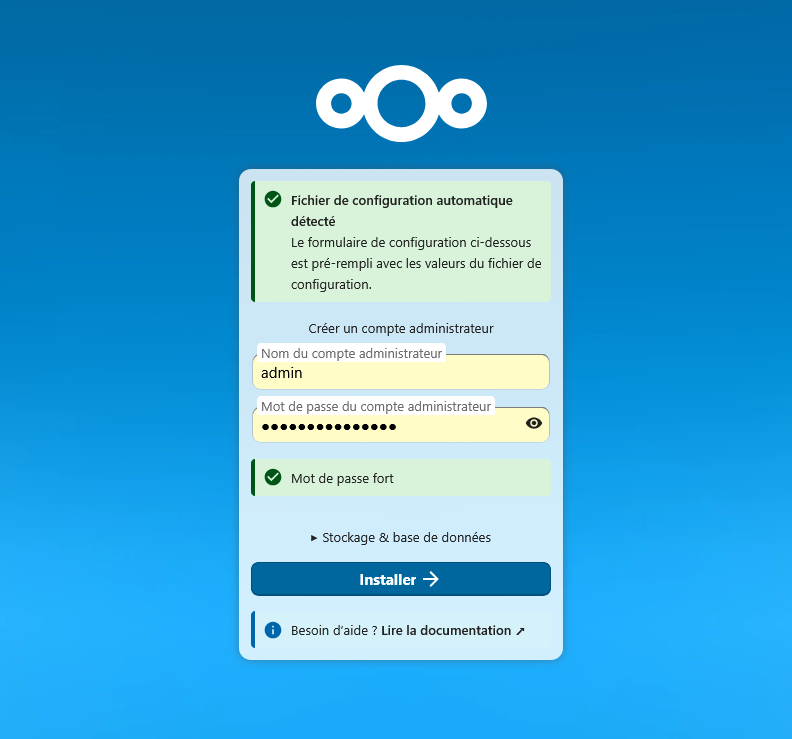
Cliquer, sur « Installer » . J’obtiens ensuite une erreur de récupération des applications recommandée, mais cela ne semble pas avoir d’impact, il suffit de saisir à nouveau l’URL pour retourner sur la page principale de NextCloud.
Démarrage automatique
# podman generate systemd --new --name mariadb -f
# podman generate systemd --new --name nextcloud -f
# mv container-* /etc/systemd/system/
# systemctl enable container-mariadb.service
# systemctl enable container-nextcloud.serviceSources :
https://www.ojambo.com/install-nextcloud-in-podman-container
https://hub.docker.com/_/mariadb






Commentaires récents