
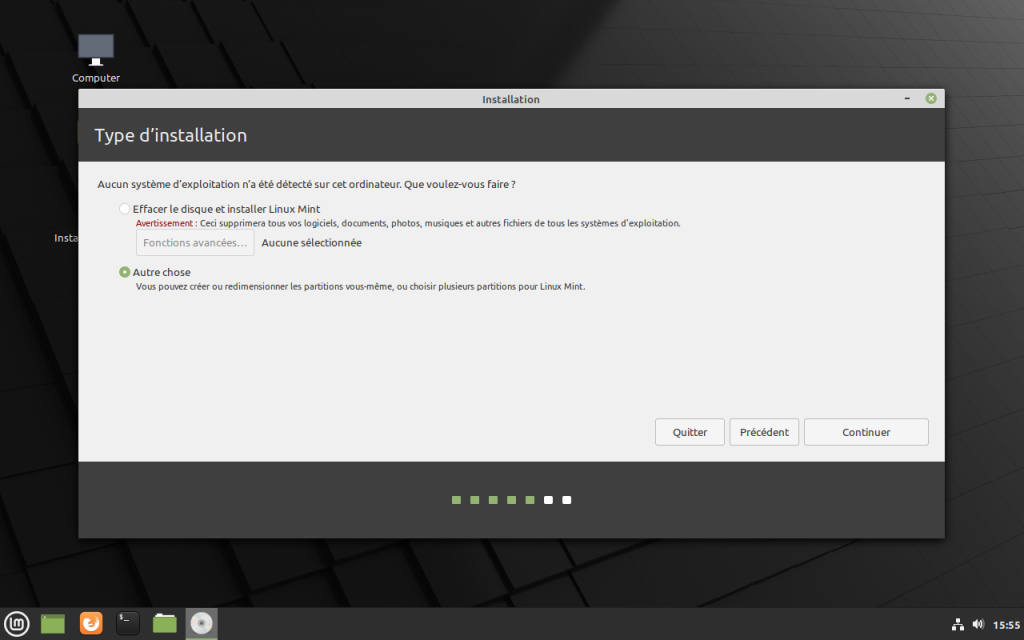
J’avais déjà il y a quelques temps publié un article décrivant comment installer Linux sur un MacPro 1.1 sans carte graphique ni EFI. Cet article proposait une méthode d’installation utilisant le mode de démarrage en mode « compatibilité BIOS », qui a pour principaux inconvénient de nécessiter un passage par un CD d’amorçage pour l’installation, et, une fois l’installation terminée, implique des temps de démarrage de plus d’une minute. Ayant depuis mis la main sur une carte graphique avec le firmware Apple adéquat, cet article décrit l’installation de Linux Mint avec amorçage EFI.
La méthode décrite dans cet article nécessite une carte graphique Apple fonctionnelle afin de pouvoir afficher le menu d’amorçage !
Création de la clé USB d’installation
Utiliser GParted pour créer une nouvelle table de partition GPT sur la clé USB.
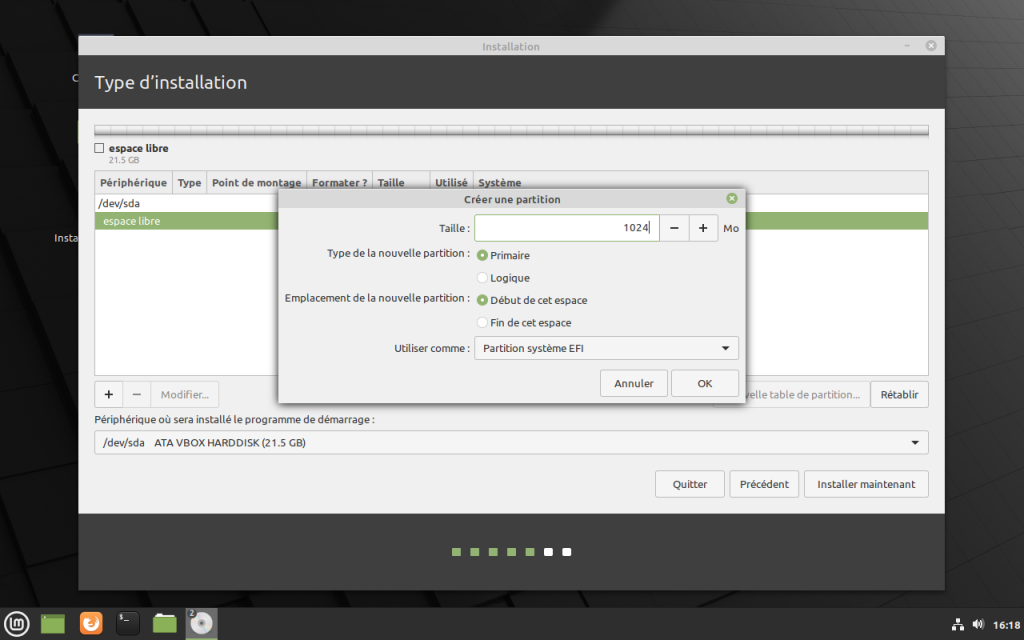
Créer 2 partitions sur la clé USB :
- Une partition « EFI », de type FAT32, de taille 200Mo, avec le fanion « boot »
- Une partition de type ext4 occupant le reste de la clé.
Copier l’intégralité des fichiers de l’ISO d’installation sur la partition ext4.
Sur la partition EFI, créer le dossier /efi/boot, et y copier le fichier bootia32.efi. (source).
Créer également le dossier /boot/grub, et y copier les fichiers vmlinuz et initrd.lz obtenus dans le dossier casper de l’ISO d’installation. Y copier également le fichier grub.cfg obtenu dans /boot/grub.
Editer le fichier grub.cfg, y insérer le contenu suivant ( avant la première entrée de menu ) :
menuentry "Install Mint MacPro" --class linuxmint {
linux /boot/grub/vmlinuz live-media-path=/casper/ ignore_uuid root=PARTUUID=XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX boot=casper nosplash noefi --
initrd /boot/grub/initrd.lz
}en remplaçant PARTUUID=XXXXXXXX-XXXX-XXXX-XXXX-XXXXXXXXXXXX par l’identifiant de la partition où l’on a copié les fichiers de l’ISO d’installation, obtenu à l’aide de la commande blkid.
Démarrage sur la clé USB d’installation
Immédiatement après avoir appuyé sur le bouton de mise sous tension du MacPro, maintenir appuyer la touche Alt du clavier, jusqu’à l’apparition d’un menu de sélection du périphérique d’amorçage. (Cela devrait prendre environ 5 secondes après le gong sonore de démarrage ) .
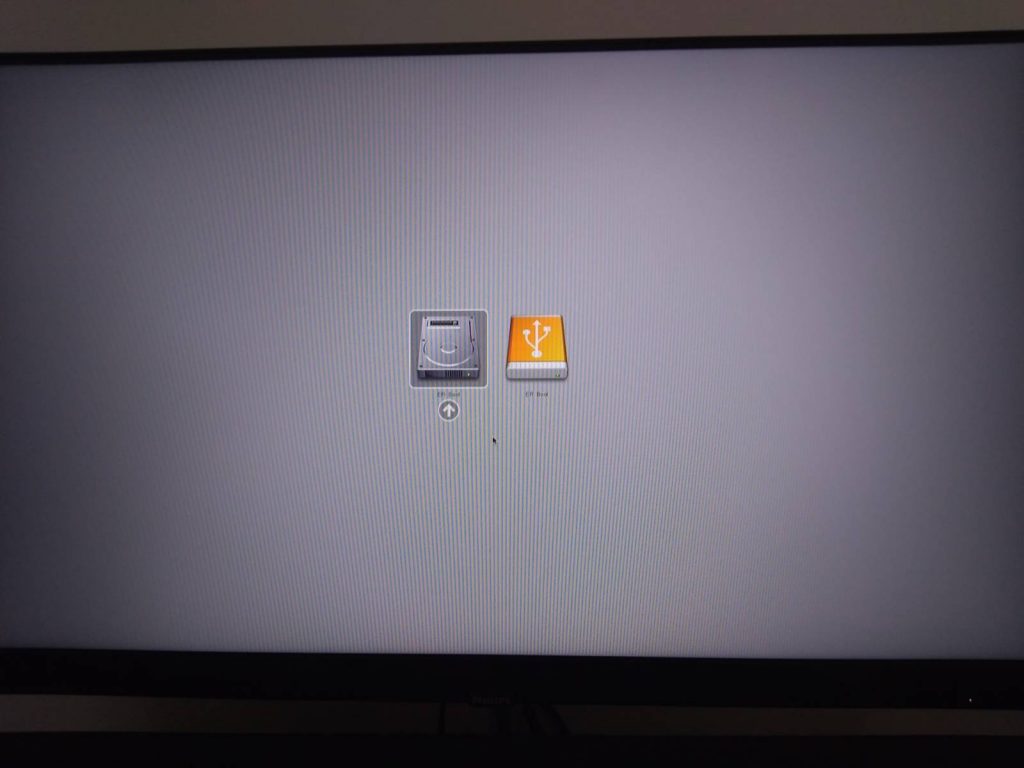
Appuyer une fois sur la flèche de droite pour sélectionner le périphérique USB EFI Bootpuis appuyer sur entrée.
Le lanceur grub démarre. Appuyer sur entrée pour procéder à la sélection de la première entrée, intitulée Install Mint MacPro.
Le démarrage de l’image d’installation prend jusqu’à 5 minutes, sans que rien ne s’affiche à l’écran, cela semble normal, et est vraisemblablement due à la faible vitesse d’accès USB de l’implémentation EFI sur ces machines.
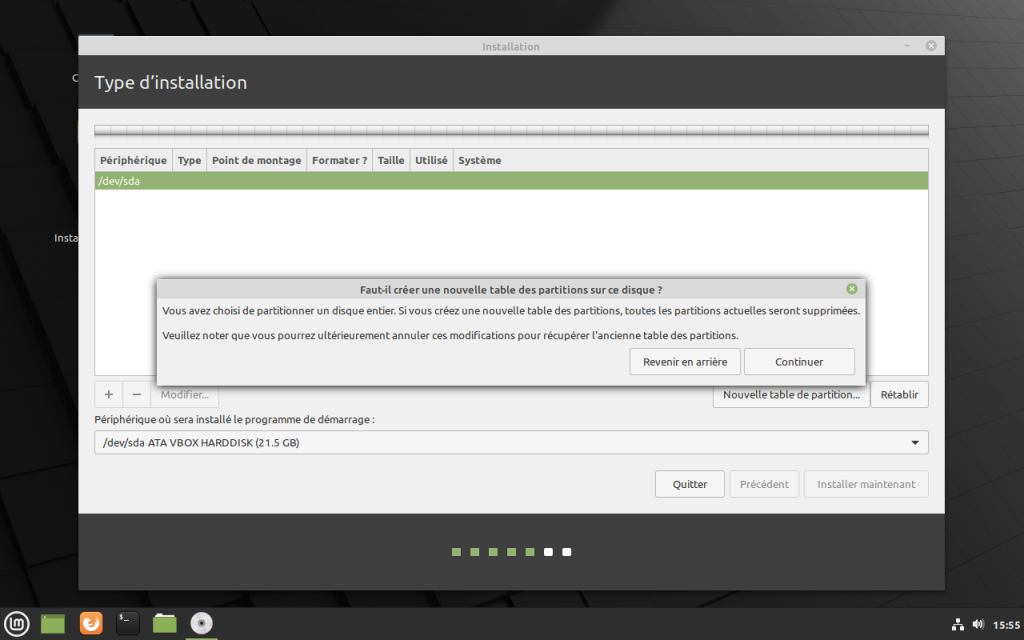
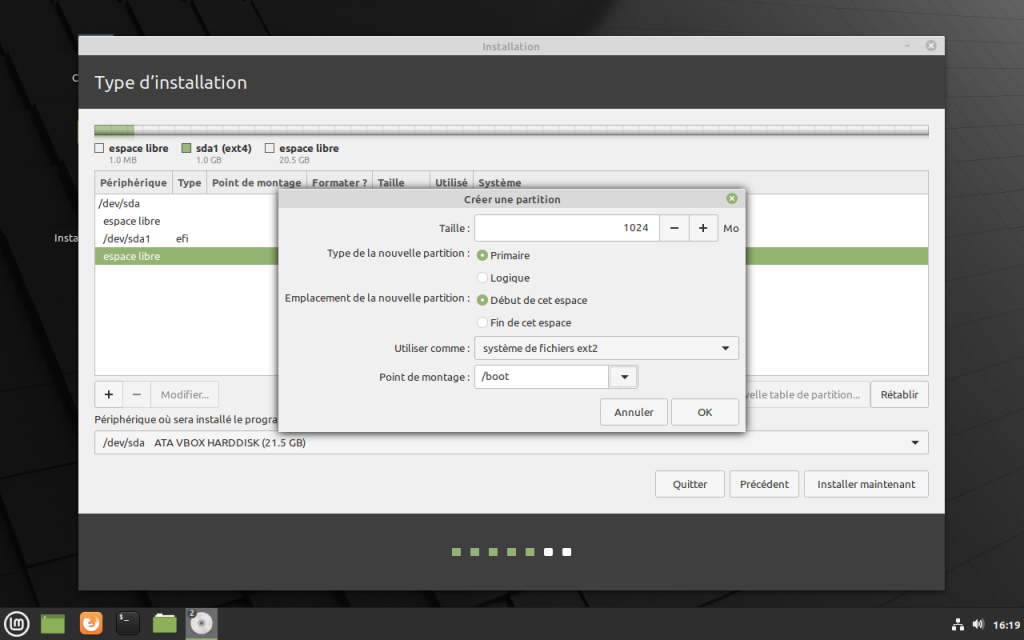
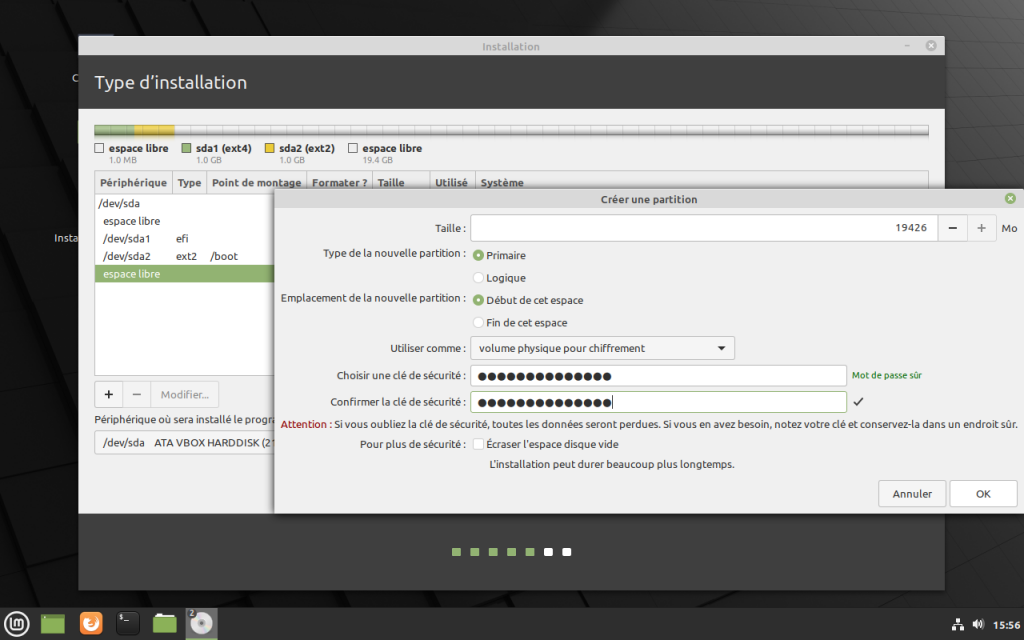
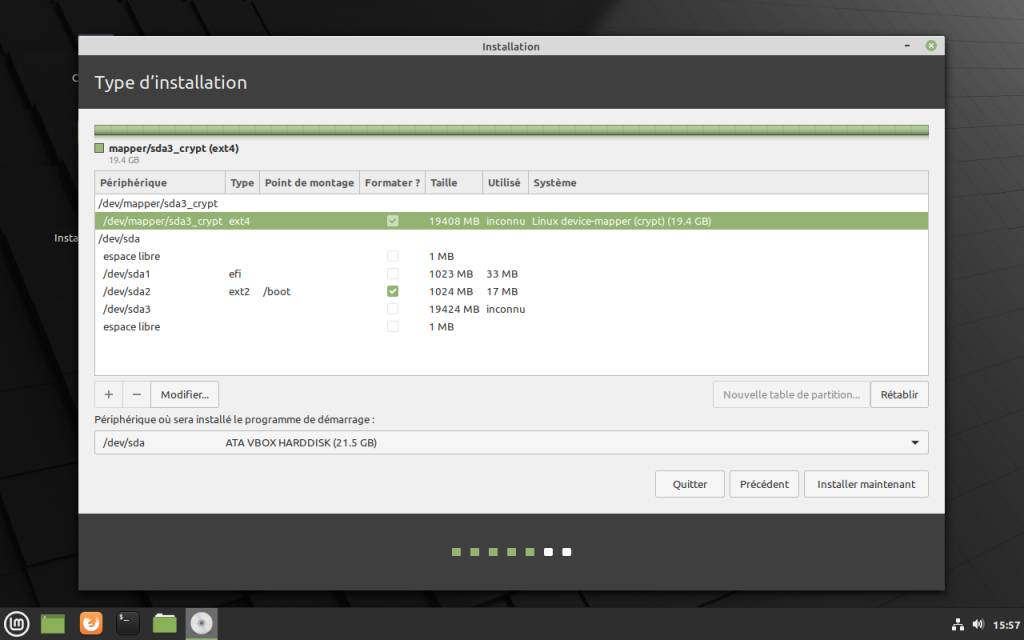
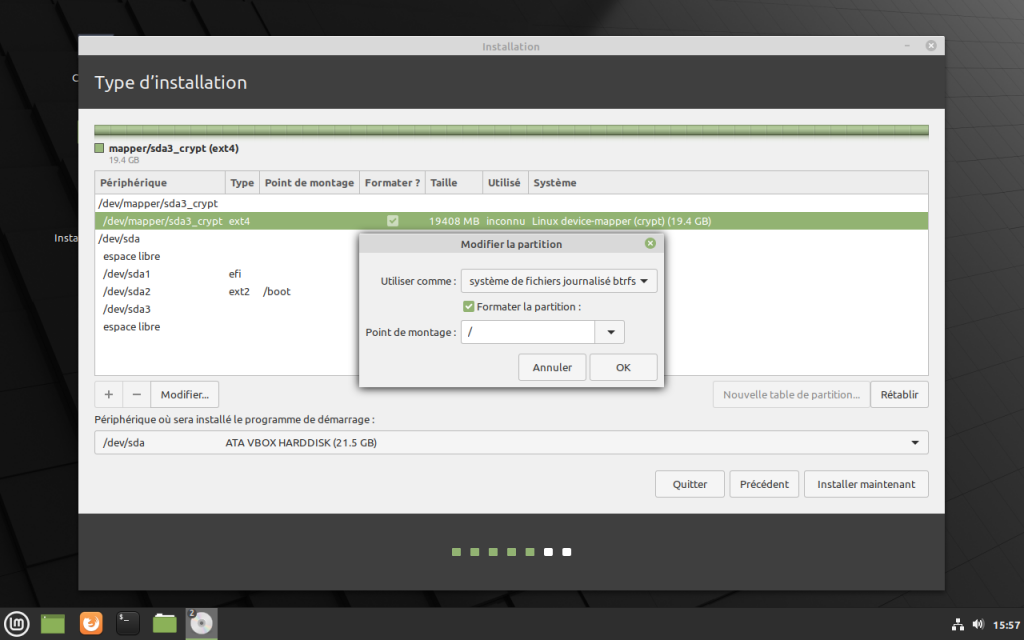
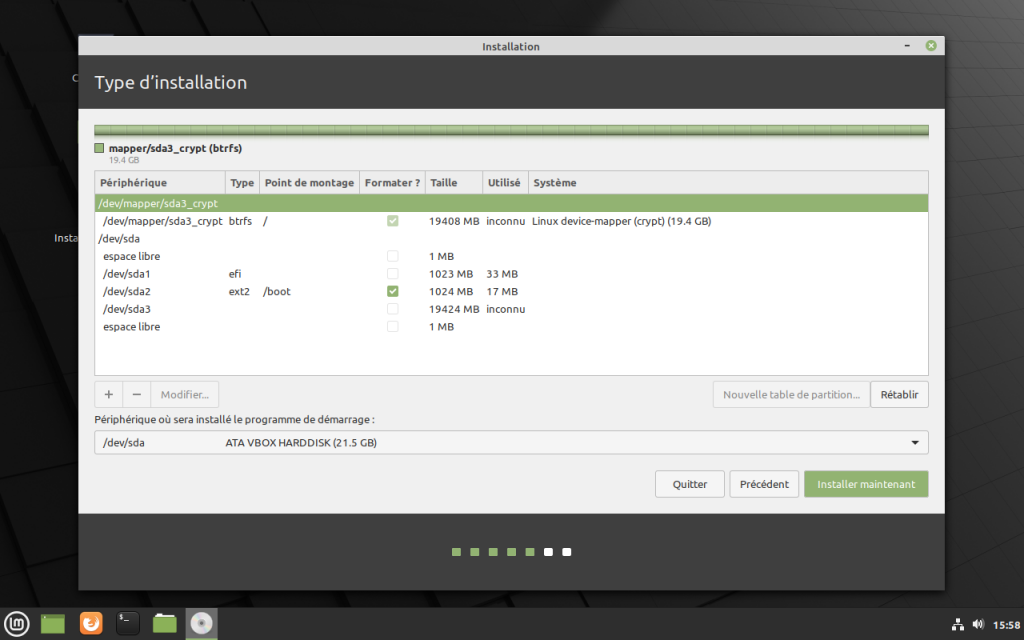
Procéder à l’installation de manière usuelle.
A la fin de l’installation, ne pas redémarrer !
Procéder au montage de la partition du disque sur lequel l’installation a été effectuée, et éditer le fichier /boot/grub/grub.cfg, et rechercher la ligne contenant les arguments noyaux pour le démarrage par défaut (Il doit s’agit de la 1ere ligne commençant par la commande linux). Y ajouter l’arguement noefisi il n’y figure pas. ( Cette modification est nécessaire pour permettre un bon démarrage du noyau ).
linux /boot/vmlinuz-5.8.0-48-generic root=UUID=dabdd8d7-32f0-46a3-9c20-ba8cf5c342aa ro quiet splash noefiUne fois la modification effectuée (et enregistrée), redémarrer la machine.
Après l’installation
Editer le fichier /etc/default/grub pour y faire figurer la modification précédemment effectuée :
GRUB_CMDLINE_LINUX="noefi"Si l’on souhaite par la suite utiliser une carte graphique ne possédant pas le firmware Apple, y apporter également la modification suivante, sans laquelle ma machine (dotée d’une carte graphique AMD R9 380) se fige à l’extinction lorsque plusieurs écrans y sont raccordés.
GRUB_CMDLINE_LINUX_DEFAULT="quiet splash nosplash"Regénérer les fichiers de configuration de grub incorporant ces modifications, à l’aide de la commande suivante :
# update-grubConclusion
La machine démarre maintenant en 40 secondes montre en main, ce qui représente une nette amélioration du temps de démarrage précédemment obtenu avec la compatibilité BIOS, qui était supérieure a la minute, sans présenter d’autre inconvénient que de nécessiter une carte graphique Apple pour procéder à l’installation. (j’ai tenté par la suite de reproduire la procédure « à l’aveugle », sans résultat).
Il ne reste plus qu’à baillonner l’interruption gpe11, et optimiser le refroidissement de la carte graphique.
Cependant, l’argument noefi étant nécessaire au bon démarrage du noyau, mon ambition de pouvoir enfin editer la variable EFI assurant le réglage du volume du gong de démarrage est tombée à l’eau. Je me contenterai du temps de démarrage raccourci !
Sources :
https://forums.linuxmint.com/viewtopic.php?t=333755
https://help.ubuntu.com/community/MacPro
Notes :
Contrairement à l’installation effectuée en mode BIOS, le paramètre noyaux amdgpu.dc=0 n’est plus nécessaire pour obtenir un affichage avec ma carte graphique AMD.
Pour résoudre le problème rencontré à l’extinction de la machine, les arguments noyau suivant ont été essayés, sans résultat : amdgpu.runpm=0, reboot=pci, acpi=noirq et irq=off


Commentaires récents