
Ce projet a été réalisé pour le club de Mini-Z de Fontaine-lès-Dijon. L’idée était de concevoir un dispositif permettant de mesurer la vitesse des voitures dans la ligne droite. Le principe retenu est le suivant : 2 faisceaux infrarouges, séparés par une distance d, coupent la piste. Lorsqu’une voiture les franchit, un microcontrôleur (PIC16F628A) mesure le temps s’écoulant entre la coupure des deux faisceaux, et connaissant la distance les séparant, calcule la vitesse de déplacement de la voiture, puis l’affiche, et éventuellement la transmet vers un ordinateur via une liaison série (USB et/ou Bluetooth):
Une image qui vaut tout le paragraphe précédent 🙂
Vous trouverez le projet Kicad ( schéma et typon ), le programme du PIC, ainsi que le programme d’affichage pour PC sur le page GitLab du projet.
Voilà, tout est dit. Enfin presque …
Tout d’abord, les récepteurs infrarouges. Il fallait que ceux-ci soient capables de distinguer les infrarouges ambiants (continus en provenance du soleil, pulsés à 50/100hz pour l’éclairage) de ceux émis par le système. La solution la plus simple a été d’utiliser des récepteurs de télécommande infrarouge, ici des TSOP1238. Conçus spécifiquement pour ignorer les infrarouges ambiants, et ne garder que les signaux pulsés à 38KHz. Ne pas oublier de munir chaque TSOP1238 d’un circuit RC de filtrage de l’alimentation, sans quoi leur comportement peut être très erratique !!
Les émetteurs infrarouges quant à eux, sont de banales LEDs infrarouges, de longueur d’onde 950nm (c’est celle à pour laquelle les TSOP1238 présentent la meilleure sensibilité), qui clignotent à 38KHz, par le biais de 2 transistors montés en darlington, pilotés par le microcontrôleur PIC.
Le PIC16F628A constitue le cerveau du système. Les 2 capteurs infrarouges sont surveillés par une interruption. Lors du déclenchement du premier capteur, le TIMER 1 est mis en fonctionnement. Il est arrêté par le déclenchement du second capteur, et le PIC procède alors au calcul de la vitesse. Celle-ci est apparait sur les afficheurs 7 segments sous la forme « DIZAINE UNITE . DECIMALE ». Si la vitesse mesurée dépasse 100km/h ( qui a dit dopage ? ^^), la décimale ne s’affiche plus, pour faire de la place au chiffre des centaines. Les prochaines voitures sont alors ignorées pendant 0.5 secondes pour permettre au public de lire la vitesse, puis le PIC retourne en attente de la prochaine voiture.
La vitesse mesurée est également transmise sur une liaison UART configurée à 9600 bauds, sans parité ni contrôle de flux. Cette liaison est gérée de façon purement logicielle, car le module « USART » du PIC ne permettait pas de ne réaliser qu’une communication unidirectionnelle, tout en gardant la broche inutilisée pour un autre usage. Cette liaison permet d’afficher la vitesse sur un ordinateur, avec le logiciel développé, via le module bluetooth intégré. Un connecteur jack est également présent, permettant de brancher un adaptateur USB/UART pour raccorder un ordinateur directement.
Si le déclenchement du second capteur n’intervient pas dans un court intervalle après celui du premier capteur (calculé pour correspondre environ au temps nécessaire pour mesurer la vitesse d’une voiture roulant à 2 km/h) , le PIC affiche un message indiquant que la voiture est passée très lentement, et retourne en attente de la prochaine voiture.
L’ensemble consomme 300 mA en pic, ce qui permet une autonomie de plusieurs heures, l’alimentation étant fournie par une batterie LiPo 11V ( et des brouettes, je n’ai pas retenu la tension exact ) à travers un régulateur à découpage ( un petit module à base de LM2596, qu’on peut trouver à moins d’1€ sur eBay !! )
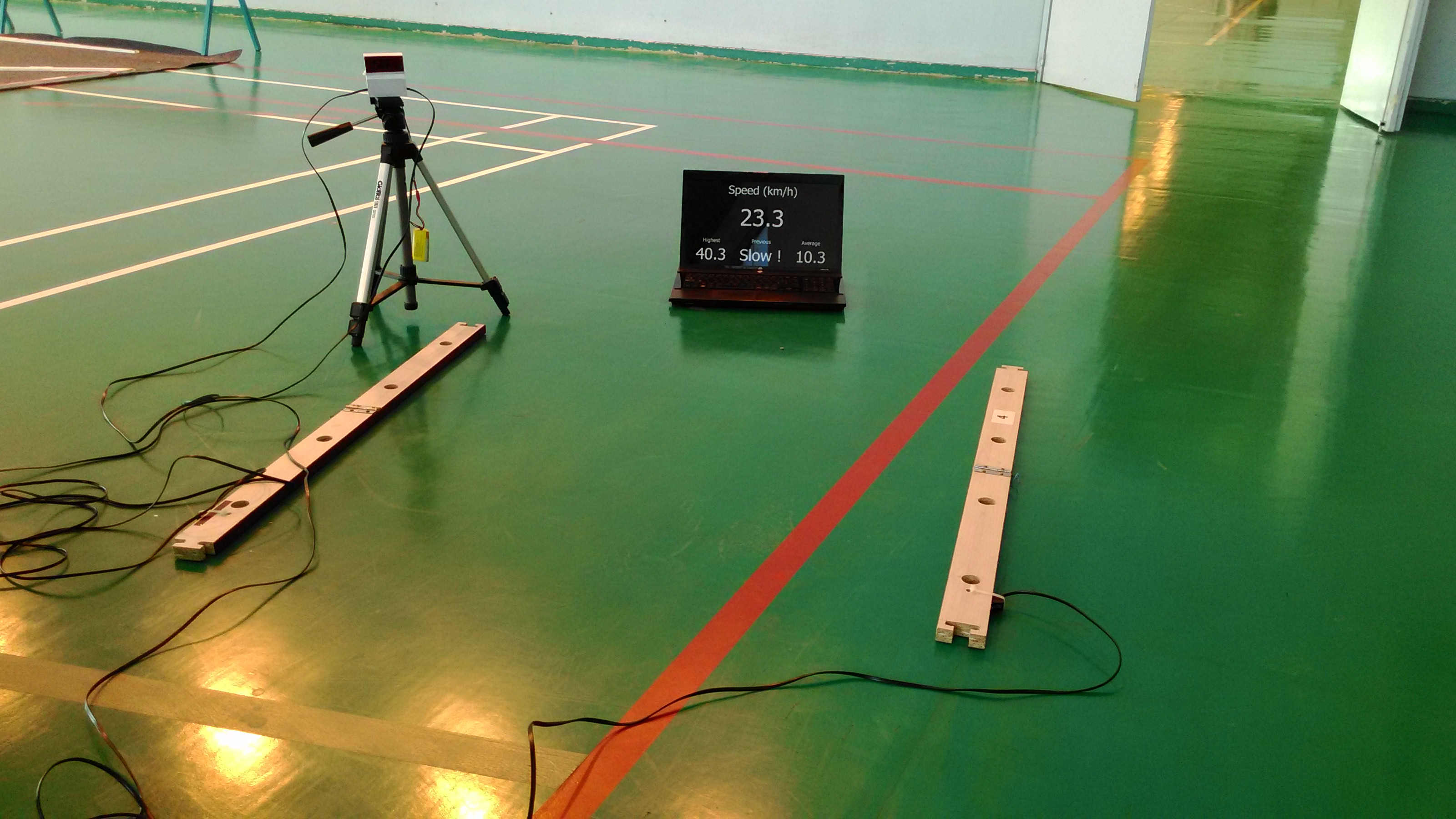
Un premier essai concluant du radar à eu lieu lors du Trophée des bouchons 2015. Une vidéo ici :
(En vrai, l’afficheur n’apparait pas aussi illisible, mais j’avoue être quand même bien content d’avoir prévu une sortie pour l’afficher sur un écran plus grand  ).
).
Durant toute la journée, le radar à parfaitement fonctionné, et, contrairement à toute attente, aucun bug de dernière minute n’a été décelé 😎
La photo suivante correspond au premier test de communication en Bluetooth. La conversion Bluetooth / UART est réalisée par un module HC-05 acheté sur ebay pour quelques euros. Leur portée est impressionnante ( presque une vingtaine de mètres ! )
L’écran est bien plus confortable que l’afficheur 7 segments
A l’heure où j’écris, le boitier définitif du radar est en cours d’impression, d’autres photos sont à venir.
L’arrière du boitier est terminé, il embarque le régulateur pour l’alimentation, le module bluetooth, ainsi qu’une prise Jack pour la connexion filaire à un PC :
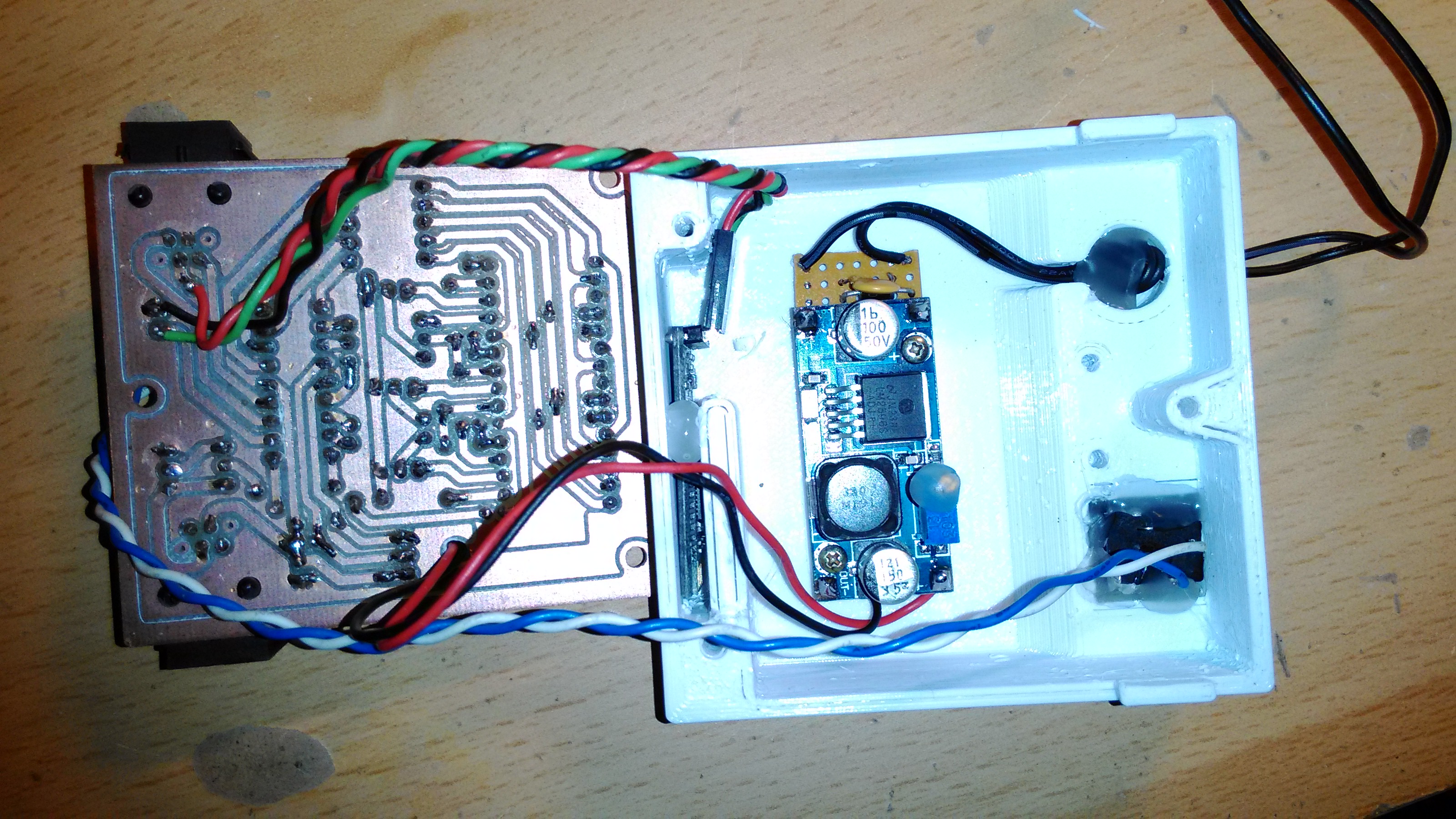
A l’intérieur du boitier
En bref, un petit projet bien sympa, qui m’as fait découvrir un univers de jeu, de compétition, et de bidouilles que j’ignorais totalement !
Vous avez peut être remarqué que cet article est écrit avec moins d’attention que les autres, j’ai beaucoup d’autres choses à faire en ce moment, et j’ai bien faillit ne pas documenter ce projet, mais que serait le monde de l’électronique si personne ne documentait ses réalisation ?
Liens :
- Idée originale : http://www.minizfrance.com/t5584-un-radar-pour-mini-z
- Site web du Fablab COAGUL de Dijon : https://fablab.coagul.org/index.php/Accueil

Commentaires récents